7.2 Derivative-based optimization#
In this section, we introduce three derivative-based optimization methods for unconstrained optimization problems.
Newton’s method#
Newton’s method was introduced in 2.3 Newton’s method as an iterative method for solving nonlinear equations. It can also be used for numerical optimization. Consider a univariate unimodal function \(f(x)\) on the interval \([a,b]\). The derivative of \(f\) equals \(0\) where the extremum is located. Therefore, the optimization problem \(\min{f(x)}\) or \(\max{f(x)}\) is converted to solving a nonlinear equation \(f'(x)=0\). Applying Newton’s method to the equation, the iterative formula is:
The following Python function newton_opt performs optimization with Newton’s method. The code is almost identical to the one used for solving nonlinear equations, with the input functions changed to the first and second derivatives of \(f\).
import numpy as np
def newton_opt(fprime, fdprime, pin, eps, N):
"""
Optimizatin using Newton's method
input:
fprime: function, the first-order derivative function
fdprime: function, the second-order derivative function
pin: float, the initial guess of the extremizer
eps: float, the tolerance for stopping the algorithm
N: int, the maximum number of steps to run
"""
n = 1
while n <= N:
p = pin - fprime(pin)/fdprime(pin)
if np.isclose(fprime(p), 0) or np.abs(p-pin) < eps:
print('p is ', p, ' and the iteration number is ', n)
return p
pin = p
n += 1
y = fprime(p)
print('Newton method did not converge. The last iteration gives ',
p, ' with derivate value ', y)
We revisit the polynomial function described in 7.1 Golden-section search, and use Newton’s method to find the minimum. Note that the initial guess should be sufficiently close to the extremizer; otherwise, the algorithm may not converge, or it simply converges to other extremizers that are also solutions to the equation \(f'(x)=0\).
Example 60
Find the minimum of the polynomial
We already know the minimizer is close to \(0.22\), so we use \(x_0=0.0\) as the initial guess.
def f(x):
return 3*x**4+2*x**2-x-1
def fprime(x):
return 12*x**3+4*x-1
def fdoubleprime(x):
return 36*x**2+4
eps = 1e-5
N = 200
pin = -0.
p = newton_opt(fprime, fdoubleprime, pin, eps, N)
print('The function f has a minimum of ', f(p), ' at ', p)
p is 0.21864332906295134 and the iteration number is 4
The function f has a minimum of -1.1161775914507224 at 0.21864332906295134
Newton’s method can also be applied to multivariate cost functions in the form of \(f(x_1,x_2,\dots,x_d)\), where \(d\) is the number of variables. The iterative formula Eqn. (62) needs to be modified, since the scalar \(f'(x)\) becomes the gradient vector of \(f\),
and the scalar \(f''(x)\) becomes the Hessian matrix,
The ratio of scalars in Eqn. (62) is now replaced by the solution of the linear system:
and the iterative formula for finding the extremizer of the multivariate function \(f(x_1,\dots,x_d)\) can be formulated as
Here \(\boldsymbol{u}\) comes from Eqn. (63), where the Hessian matrix and the gradient vector are evaluated at the current estimate \(\boldsymbol{x}_{i}\).
The following Python function newton_opt_mv performs Newton’s method for optimizing multivariate cost functions.
def newton_opt_mv(fgrad, fhessian, pin, eps, N):
'''
Multivariate Newton's method for optimization
input:
fgrad: function, the function that returns gradient
fhessian: function, the function that returns the hessian matrix
pin: a 1d numpy array of size d, where x=(x_1,...,x_d), the initial guess of the extremizer
eps: float, the tolerance for stopping the algorithm
N: int, the maximum number of steps to run
'''
d = pin.size # number of variables
n = 1
while n <= N:
p = pin + np.linalg.solve(fhessian(pin), -fgrad(pin))
if np.all(np.isclose(fgrad(p), np.zeros(d))) or np.linalg.norm(p-pin, ord=np.inf) < eps:
print('p is ', p, ' and the iteration number is ', n)
return p
pin = p.copy()
n += 1
y = fgrad(p)
print('Method did not converge. The last iteration gives ',
p, ' with gradient value ', y)
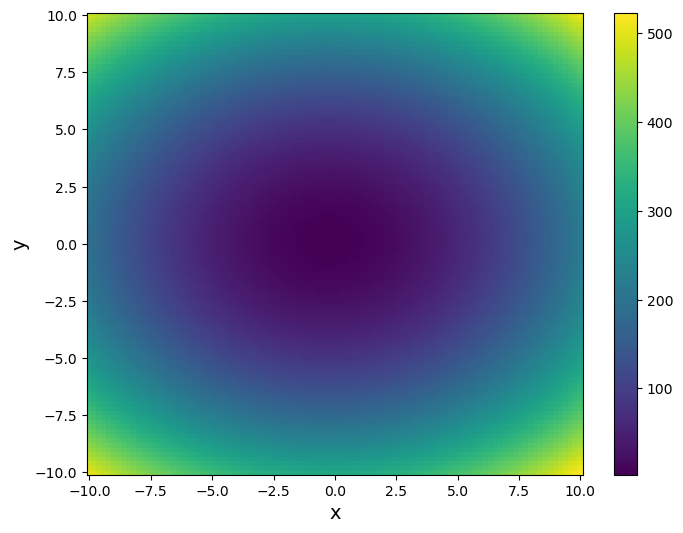
We consider the following 2D function
The function has a global minimum in its domain, which can be seen from the following 2D pseudocolor and 3D surface plots.
import matplotlib.pyplot as plt
%matplotlib inline
from matplotlib import cm
def f(x):
return 2*x[0]**2+3*x[1]**2+x[0]-x[1]+3
# Make a psudeocolor plot
fig = plt.figure(figsize=(8,6))
x = np.linspace(-10, 10, 100)
y = np.linspace(-10, 10, 100)
XX, YY = np.meshgrid(x, y, indexing='ij')
ZZ = np.zeros(XX.shape)
for i in range(x.size):
for j in range(y.size):
ZZ[i,j] = f([XX[i,j], YY[i,j]])
plt.pcolor(XX, YY, ZZ, shading='nearest')
plt.xlabel('x', fontsize=14)
plt.ylabel('y', fontsize=14)
plt.colorbar();
# Make a 3D surface plot
fig, ax = plt.subplots(subplot_kw={"projection": "3d"}, figsize=(8,8))
surf = ax.plot_surface(XX, YY, ZZ, cmap=cm.coolwarm,
linewidth=0, antialiased=False)
ax.set_xlabel('x', fontsize=14)
ax.set_ylabel('y', fontsize=14)
ax.set_zlabel('z', fontsize=14)
fig.colorbar(surf, shrink=0.7);
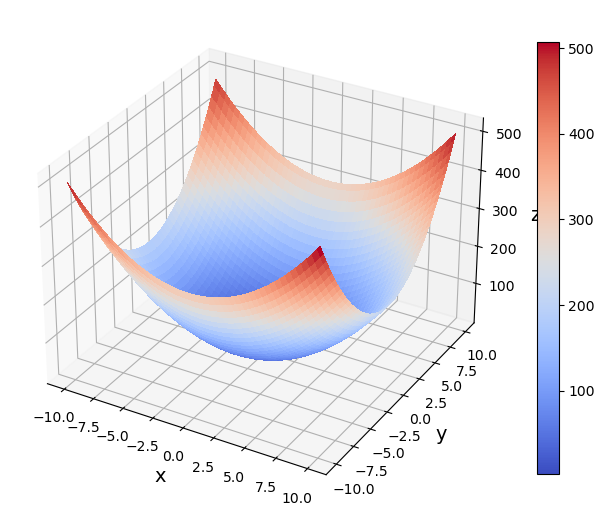
We can rewrite Eqn. (65) by completing squares as
So \(f\) has a minimum of \(\frac{67}{24}\) at the point \(\left[-\frac{1}{4}, \frac{1}{6}\right]\).
Apply Newton’ method to the function, with an initial vector of \([1,2]\). We can see that the same results are obtained.
def grad(x):
return np.array([4*x[0]+1, 6*x[1]-1])
def hessian(x):
return np.array([[4., 0], [0, 6]])
pin = np.array([1., 2])
eps = 1e-5
N = 200
p = newton_opt_mv(grad, hessian, pin, eps, N)
print('The function f has a minimum of ', f(p), ' at ', p)
p is [-0.25 0.16666667] and the iteration number is 1
The function f has a minimum of 2.7916666666666665 at [-0.25 0.16666667]
We now animate the process of Newton’s method. The following animation shows the true minimizer, the estimates produced by Newton’s method, and the contour plot of the cost function \(f(\boldsymbol{x})\).
Show code cell source
from matplotlib.animation import FuncAnimation
from IPython.display import HTML
# Newton's method for the animation
def newton_mv_nstep(fgrad, fhessian, pin, nstep):
'''
Multivariate Newton's method for optimization. The algorithm run nstep steps
input:
fgrad: function, the function that returns gradient
fhessian: function, the function that returns the hessian matrix
pin: a 1d numpy array of size d, where x=(x_1,...,x_d), the initial guess of the extremizer
nstep: int, the number of steps to run
'''
d = pin.size # number of variables
p = pin.copy()
n = 1
while n <= nstep:
p = pin + np.linalg.solve(fhessian(pin), -fgrad(pin))
pin = p.copy()
n += 1
return p
# Animation for Newton's method
pin = np.array([1., 2])
true_sol = np.array([-1/4, 1/6])
fig, ax = plt.subplots(figsize=(8,6))
CS = ax.contourf(XX, YY, ZZ, levels=30)
cb = fig.colorbar(CS)
cb.ax.set_ylabel('f(x,y)')
def animate(i):
ax.cla()
ax.set_xlim(-10, 10)
ax.set_ylim(-10, 10)
ax.contourf(XX, YY, ZZ, levels=30)
x = newton_mv_nstep(grad, hessian, pin, i)
ax.plot(x[0], x[1], 'o', color='r', ms=6, label='Newton method')
ax.plot(true_sol[0], true_sol[1], 's', color='green', ms=6, label='True solution')
ax.set_title('Newton method : iteration step '+str(i), size=16)
ax.set_xlabel('$x$', size=16)
ax.set_ylabel('$y$', size=16)
ax.legend(loc='upper right')
plt.close()
anim = FuncAnimation(fig, animate, frames=20, interval=1000)
HTML(anim.to_jshtml())
In this case, since \(\nabla f(\boldsymbol{x})\) is linear, Newton’s method converges to the true minimizer in just one step.
Example 61
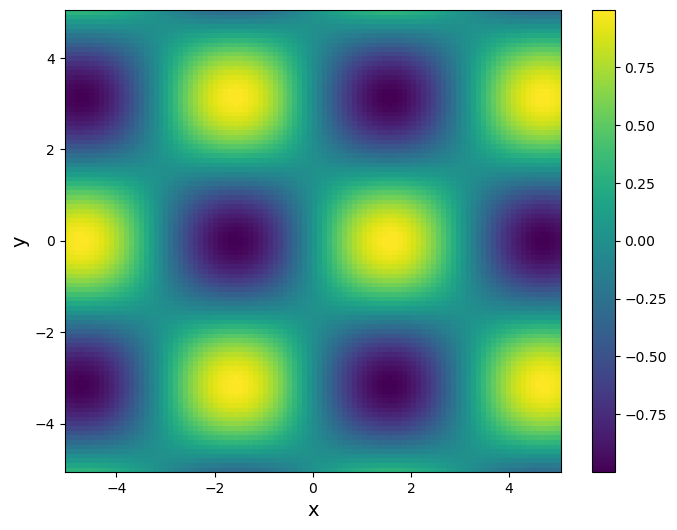
Apply Newton’s method to the following function
with different initial vectors \(\boldsymbol{x}_0\).
We first visualize the cost function.
def f(x):
return np.sin(x[0])*np.cos(x[1])
fig = plt.figure(figsize=(8,6))
x = np.linspace(-5, 5, 100)
y = np.linspace(-5, 5, 100)
XX, YY = np.meshgrid(x, y, indexing='ij')
ZZ = np.zeros(XX.shape)
for i in range(x.size):
for j in range(y.size):
ZZ[i,j] = f([XX[i,j], YY[i,j]])
plt.pcolor(XX, YY, ZZ, shading='nearest')
plt.xlabel('x', fontsize=14)
plt.ylabel('y', fontsize=14)
plt.colorbar();
# Make a 3D surface plot
fig, ax = plt.subplots(subplot_kw={"projection": "3d"}, figsize=(8,8))
surf = ax.plot_surface(XX, YY, ZZ, cmap=cm.coolwarm,
linewidth=0, antialiased=False)
ax.set_xlabel('x', fontsize=14)
ax.set_ylabel('y', fontsize=14)
ax.set_zlabel('z', fontsize=14)
fig.colorbar(surf, shrink=0.7);
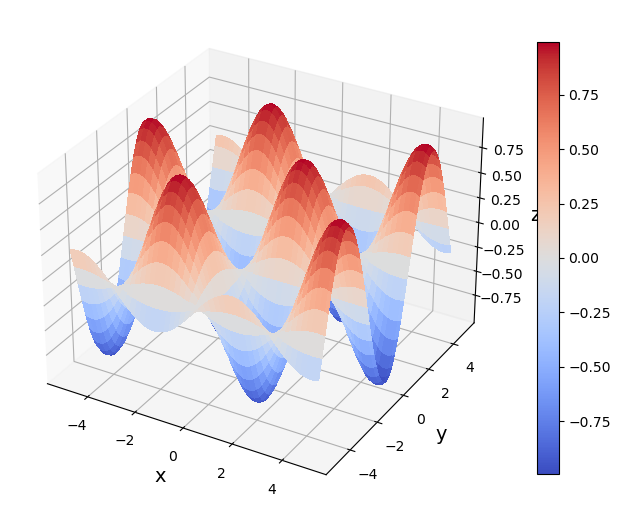
The plots clearly show that there are infinitely many extrema, and minima and maxima alternate. In this case, the choice of the initial guess determines which solution Newton’s method converges to. First, we consider using an initial vector of \(\boldsymbol{x}_0=[1,3]\), which is close to the point \(\left[\frac{\pi}{2}, \pi\right]\), at which \(f(x)\) achieves a minimum \(\sin\left[\frac{\pi}{2}\right]\cos{\pi}=-1\).
def grad(x):
return np.array([np.cos(x[0])*np.cos(x[1]), -np.sin(x[0])*np.sin(x[1])])
def hessian(x):
return np.array([[-np.sin(x[0])*np.cos(x[1]), -np.cos(x[0])*np.sin(x[1])],
[-np.cos(x[0])*np.sin(x[1]), -np.sin(x[0])*np.cos(x[1])]])
pin = np.array([1., 3])
eps = 1e-5
N = 200
p = newton_opt_mv(grad, hessian, pin, eps, N)
print('The function f has a minimum of ', f(p), ' at ', p)
p is [1.57079633 3.14159265] and the iteration number is 3
The function f has a minimum of -1.0 at [1.57079633 3.14159265]
The results are in agreement with what we expected. Now consider another initial vector \(\boldsymbol{x}_0=[4, 3]\) and apply Newton’s method again.
pin = np.array([4., 3])
eps = 1e-5
N = 200
p = newton_opt_mv(grad, hessian, pin, eps, N)
print('The function f has a maximum of ', f(p), ' at ', p)
p is [4.71238898 3.14159265] and the iteration number is 4
The function f has a maximum of 1.0 at [4.71238898 3.14159265]
We see that Newton’s method converges to the maximum close to the initial vector.
Note that Newton’s method not only utilizes the first-order derivative information (gradient), but also the second-order derivatives (Hessian). If the Hessian matrix is available, Newton’s method can converge faster than the two methods that only utilize the gradient information to be introduced next.
The animated processes of the convergences of the two initial guesses are shown below. Newton’s method also converges fast for both cases.
Show code cell source
# Newton's method for the animation
def newton_mv_nstep(fgrad, fhessian, pin, nstep):
'''
Multivariate Newton's method for optimization. The algorithm run nstep steps
input:
fgrad: function, the function that returns gradient
fhessian: function, the function that returns the hessian matrix
pin: a 1d numpy array of size d, where x=(x_1,...,x_d), the initial guess of the extremizer
nstep: int, the number of steps to run
'''
d = pin.size # number of variables
p = pin.copy()
n = 1
while n <= nstep:
p = pin + np.linalg.solve(fhessian(pin), -fgrad(pin))
pin = p.copy()
n += 1
return p
# Animation for Newton's method
pin1 = np.array([1., 3])
pin2 = np.array([4., 3])
true_sol1 = np.array([np.pi/2, np.pi])
true_sol2 = np.array([3*np.pi/2, np.pi])
fig, ax = plt.subplots(figsize=(8,6))
CS = ax.contourf(XX, YY, ZZ, levels=30)
cb = fig.colorbar(CS)
cb.ax.set_ylabel('f(x,y)')
def animate(i):
ax.cla()
ax.set_xlim(-5, 5)
ax.set_ylim(-5, 5)
ax.contourf(XX, YY, ZZ, levels=30)
x1 = newton_mv_nstep(grad, hessian, pin1, i)
ax.plot(x1[0], x1[1], 'o', color='r', ms=6, label='Newton method-case 1')
ax.plot(true_sol1[0], true_sol1[1], 's', color='green', ms=6, label='True solution-case 1')
x2 = newton_mv_nstep(grad, hessian, pin2, i)
ax.plot(x2[0], x2[1], 'o', color='m', ms=6, label='Newton method-case 2')
ax.plot(true_sol2[0], true_sol2[1], 's', color='y', ms=6, label='True solution-case 2')
ax.set_title('Newton method : iteration step '+str(i), size=16)
ax.set_xlabel('$x$', size=16)
ax.set_ylabel('$y$', size=16)
ax.legend(loc='lower right')
plt.close()
anim = FuncAnimation(fig, animate, frames=20, interval=1000)
HTML(anim.to_jshtml())
Conjugate gradient#
The conjugate gradient method was discussed in 3.3 Cholesky decomposition as an algorithm for solving linear systems where the coefficient matrices are symmetric positive definite (SPD). Here, we show how it can be used to find extrema and extremizers. If the multivariate cost function \(f(\boldsymbol{x})\) can be written as the following quadratic form in matrix notation
where \(A\) is an \(n \times n\) SPD matrix, then the gradient of \(f\) takes the form of
Therefore, finding the extremizer of \(f\) is equivalent to solving an SPD linear system \(A\boldsymbol{x}=\boldsymbol{b}\), and conjugate gradient can be employed for that purpose.
Example 62
Find the minimizer of the function
Note that \(f\) can be written as
Hence in this example,
The solution can be easily seen as \([0, 0]^T\), which minimizes \(f\).
The following Python function ConjGrad performs conjugate gradient to find extremizers once the matrix \(A\) and vector \(\boldsymbol{b}\) are identified.
# Conjugate Gradient Method
def ConjGrad(A, b, x0, eps):
"""
Perform conjugate Gradient method, the second version.
A: an symmetric positive definite matrix
b: the right-hand side
x0: the initial guess
eps: the tolerance for stopping the algorithm
"""
if not np.array_equal(A.T, A):
print('Error: the matrix A is not symmetric!')
return
n = A.shape[0]
r_old = b-np.dot(A, x0)
r_new = r_old.copy()
if np.linalg.norm(r_old) < eps:
return x
u = r_old
x = x0.copy()
for k in range(n):
a = np.dot(r_old, r_old)/np.dot(u, np.dot(A,u))
x += a*u
r_new = r_old - a*np.dot(A, u)
if np.linalg.norm(r_new) < eps:
return x
b = np.dot(r_new, r_new)/np.dot(r_old, r_old)
u = r_new + b*u
r_old = r_new.copy()
return x
Applying ConjGrad to \(f\), the same results are obtained.
def f(x):
return x[0]**2 + x[1]**2
A = np.array([[2., 0], [0, 2]])
b = np.array([0., 0])
x0 = np.ones(2)
eps = 1e-9
p = ConjGrad(A, b, x0, eps)
print('The function f has a minimum of ', f(p), ' at ', p)
The function f has a minimum of 0.0 at [0. 0.]
Example 63
Locate the extremum of the following function of three variables:
Rewrite \(f(x_1,x_2,x_3)\) in the quadratic form of \(\frac{1}{2}\boldsymbol{x}^TA\boldsymbol{x} - \boldsymbol{b}^T\boldsymbol{x}\):
So \(A\) and \(\boldsymbol{b}\) can be identified as
Now we can apply the conjugate gradient method.
def f(x):
x1, x2, x3 = x[0], x[1], x[2]
return 5*x1**2 + 3/2*x2**2 + 3/2*x3**2 + 5*x1*x2 + 2*x1*x3 + 2*x2*x3 - 7*x1 - 4*x2 - 3*x3
A = np.array([[10., 5, 2], [5, 3, 2], [2, 2, 3]])
b = np.array([7., 4, 3])
x0 = np.zeros(3)
eps = 1e-9
p = ConjGrad(A, b, x0, eps)
print('The function f has a extremum of ', f(p), ' at ', p)
The function f has a extremum of -2.9999999999999987 at [ 1. -1. 1.]
The result shows the extremizer of \(f\) is \([1, -1, 1]\) and the corresponding extremum is \(-3\).
When the cost function \(f(\boldsymbol{x})\) cannot be written in the form of Eqn. (66), conjugate gradient can still be applied. There will be no matrix \(A\) and vector \(b\) and hence changes should be made to the original algorithms. In reference to the conjugate gradient algorithm of the second version in 3.3 Cholesky decomposition, the initializations of \(\boldsymbol{r}_0\) and \(\boldsymbol{u}_0\) should be changed to
and \(\boldsymbol{u}_0 = \boldsymbol{r}_0 \), due to Eqn. (67). In Step 2(1), the quantity \(a_k\), which determines how far the current estimate should move along the new direction \(\boldsymbol{u}_k\), is obtained by minimizing the function \(f(\boldsymbol{x}_k+a\boldsymbol{u}_k)\) with respect to \(a\). This step involves a 1D minimization problem, which can be solved by e.g. golden-section search. The last part that needs to be changed is Step 2(3), where the new \(\boldsymbol{r}\) should be updated by
which can be easily seen from the algorithm of the first version.
Hence the algorithm of conjugate gradient method for optimization can be summarized as:
Algorithm 3 (Conjugate gradient for optimization)
Initialize \(\boldsymbol{x}_0\) as any vector. Set \(\boldsymbol{r}_0=-\nabla f(\boldsymbol{x}_0)\) and \(\boldsymbol{u}_0=\boldsymbol{r}_0\)
For \(k=0, 1, \dots, N-1\):
minimize \(f(\boldsymbol{x}_k+a\boldsymbol{u}_k)\) with respect to \(a\), i.e., \(a_k = \text{argmin}_{a}f(\boldsymbol{x}_k+a\boldsymbol{u}_k)\)
\(\boldsymbol{x}_{k+1} = \boldsymbol{x}_k + a_k \boldsymbol{u}_k\)
\(\boldsymbol{r}_{k+1} = -\nabla f(\boldsymbol{x}_{k+1})\)
if (\(||\boldsymbol{r}_{k+1}|| < \epsilon\)):
break
\(\boldsymbol{b}_k = \frac{\boldsymbol{r}_{k+1}^T\boldsymbol{r}_{k+1}}{\boldsymbol{r}_{k}^T\boldsymbol{r}_{k}}\)
\(\boldsymbol{u}_{k+1} = \boldsymbol{r}_{k+1} + \boldsymbol{b}_k\boldsymbol{u}_{k}\)
return \(\boldsymbol{x}_{k+1}\)
The Python function ConjGrad_opt realizes the conjugate gradient algorithm that applies to a general cost function \(f(\boldsymbol{x})\). It uses a built-in function from the scipy package to solve the 1d minimization problem by golden-section search.
from scipy.optimize import golden
# Conjugate Gradient Method
def ConjGrad_opt(fgrad, fa, x0, N, eps):
"""
Perform conjugate gradient search for optimization
fgrad: function, the gradient function of the cost function f
fa: function, the function f(x+au). The inputs of fa are a, x and u.
x0: a 1d numpy array, the initial guess
N: int, the maximum number of steps of CG to perform
eps: the tolerance for stopping the algorithm
"""
r_old = -fgrad(x0)
r_new = r_old.copy()
if np.linalg.norm(r_old) < eps:
return x
u = r_old.copy()
x = x0.copy()
for k in range(N):
a = golden(fa, args=(x, u))
x += a*u
r_new = -fgrad(x)
if np.linalg.norm(r_new) < eps:
return x
b = np.dot(r_new, r_new)/np.dot(r_old, r_old)
u = r_new + b*u
r_old = r_new.copy()
return x
Example 64
Locate the minimum of the following function using conjugate gradient method.
Completing squares for the cost function, we can easily see that the minimizer is \([2,1]\) and the corresponding minimum is \(3\). Now we apply the ConjGrad_opt Python function.
def f(x):
return 0.5*x[0]**2-2*x[0]+x[1]**2-2*x[1]+6
def fgrad(x):
return np.array([x[0]-2, 2*x[1]-2])
def fa(a, x, u):
return f(x+a*u)
x0 = np.zeros(2)
N = 200
eps = 1e-9
p = ConjGrad_opt(fgrad, fa, x0, N, eps)
print('The function f has a minimum of ', f(p), ' at ', p)
The function f has a minimum of 3.0 at [2.00000002 0.99999998]
The following animation demonstrates the convergence of conjugate gradient, along with the \(\boldsymbol{r}\) and \(\boldsymbol{u}\) directions.
Show code cell source
x = np.linspace(-3, 7, 100)
y = np.linspace(-4, 6, 100)
XX, YY = np.meshgrid(x, y, indexing='ij')
ZZ = np.zeros(XX.shape)
for i in range(x.size):
for j in range(y.size):
ZZ[i,j] = f([XX[i,j], YY[i,j]])
# Conjugate gradient method for the animation
def ConjGrad_opt_nstep(fgrad, fa, x0, nstep):
"""
Perform conjugate Gradient search for optimization for nstep steps
fgrad: function, the gradient function of the cost function f
fa: function, the function f(x+au). The inputs of fa are a, x and u.
x0: a 1d numpy array, the initial guess
nstep: int, the number of steps of CG to perform
"""
r_old = -fgrad(x0)
r_new = r_old.copy()
if np.linalg.norm(r_old) < eps:
return x
u = r_old.copy()
x = x0.copy()
for k in range(nstep):
a = golden(fa, args=(x, u))
x += a*u
r_new = -fgrad(x)
b = np.dot(r_new, r_new)/np.dot(r_old, r_old)
u = r_new + b*u
r_old = r_new.copy()
a = golden(fa, args=(x, u))
return x, r_new, u, a
# Animation for Newton's method
x0 = np.zeros(2)
true_sol = np.array([2., 1])
fig, ax = plt.subplots(figsize=(8,6))
CS = ax.contourf(XX, YY, ZZ, levels=30)
cb = fig.colorbar(CS)
cb.ax.set_ylabel('f(x,y)')
def animate(i):
ax.cla()
ax.set_xlim(-3, 7)
ax.set_ylim(-4, 6)
ax.contourf(XX, YY, ZZ, levels=30)
x, r, u, a = ConjGrad_opt_nstep(fgrad, fa, x0, i)
x1 = newton_mv_nstep(grad, hessian, pin1, i)
ax.plot(x[0], x[1], 'o', color='r', ms=6, label='CG')
ax.quiver([x[0]], [x[1]], [a*u[0]], [a*u[1]], angles='xy', scale_units='xy', scale=1,
color='r', label='u direction')
ax.quiver([x[0]], [x[1]], [r[0]], [r[1]], angles='xy',
color='c', label='r direction')
ax.plot(true_sol[0], true_sol[1], 's', color='green', ms=6, label='True solution')
ax.set_title('Conjugate gradient method : iteration step '+str(i), size=16)
ax.set_xlabel('$x$', size=16)
ax.set_ylabel('$y$', size=16)
ax.legend(loc='lower right')
plt.close()
anim = FuncAnimation(fig, animate, frames=3, interval=1000)
HTML(anim.to_jshtml())
It can be seen that conjugate gradient locates the minimizer after 2 steps.
Steepest descent#
As the last method to be introduced employing the derivative information to locate minimizers of a function \(f(\boldsymbol{x})\), steepest descent searches the minimum by constantly moving along the negative gradient direction, along which the value of the cost function drops the fastest. The algorithm determines how far the estimate \(\boldsymbol{x}\) moves by solving a 1d minimization problem similar to the conjugate gradient method.
The steepest descent algorithm can be summarized as follows.
Algorithm 4 (Steepest descent)
Initialize \(\boldsymbol{x}_0\).
For \(k=0, 1, \dots, N-1\):
find the gradient \(\boldsymbol{g} = \nabla f(\boldsymbol{x}_k)\)
minimize \(f(\boldsymbol{x}_k-a\boldsymbol{g})\) with respect to \(a\). Let \(a_k=\text{argmin}_{a}f(\boldsymbol{x}_k-a\boldsymbol{g})\)
update \(\boldsymbol{x}\) by \(\boldsymbol{x}_{k+1} = \boldsymbol{x}_k-a_k\boldsymbol{g}\)
return \(\boldsymbol{x}_{k+1}\)
The following Python function steepest_descent implements the steepest descent algorithm. The 1d minimization problem is again solved by using golden-section search. The algorithm stops either when a specified maximum number of steps is reached or when the norm of the gradient is small enough.
# Steepest Descent Method
def steepest_descent(fgrad, fa, x0, N, eps):
"""
Perform steepest descent search for optimization
fgrad: function, the gradient function of the cost function f
fa: function, the function f(x-ag). The inputs of fa are a, x and g.
x0: a 1d numpy array, the initial guess
N: int, the maximum number of steps of SD to perform
eps: the tolerance for stopping the algorithm
"""
x = x0.copy()
for k in range(N):
g = fgrad(x)
if np.linalg.norm(g) < eps:
return x
a = golden(fa, args=(x, g))
x -= a*g
return x
Example 65
Revisit Example 64 using steepest descent.
Apply the steepest descent algorithm with the steepest_descent function.
def f(x):
return 0.5*x[0]**2-2*x[0]+x[1]**2-2*x[1]+6
def fgrad(x):
return np.array([x[0]-2, 2*x[1]-2])
def fa(a, x, g):
return f(x-a*g)
x0 = np.zeros(2)
N = 200
eps = 1e-9
p = steepest_descent(fgrad, fa, x0, N, eps)
print('The function f has a minimum of ', f(p), ' at ', p)
The function f has a minimum of 3.0 at [1.99999997 1. ]
Note that the convergence of steepest descent is significantly slower than that of the conjugate gradient method, although both produce the correct solution. We demonstrate the slow convergence using the following animation.
Show code cell source
x = np.linspace(-3, 7, 100)
y = np.linspace(-4, 6, 100)
XX, YY = np.meshgrid(x, y, indexing='ij')
ZZ = np.zeros(XX.shape)
for i in range(x.size):
for j in range(y.size):
ZZ[i,j] = f([XX[i,j], YY[i,j]])
# Newton's method for the animation
def steepest_descent_nstep(fgrad, fa, x0, nstep):
"""
Perform steepest descent search for optimization for nstep steps
fgrad: function, the gradient function of the cost function f
fa: function, the function f(x-ag). The inputs of fa are a, x and g.
x0: a 1d numpy array, the initial guess
nstep: int, the number of steps of SD to perform
"""
x = x0.copy()
for k in range(nstep):
g = fgrad(x)
a = golden(fa, args=(x, g))
x -= a*g
g = fgrad(x)
a = golden(fa, args=(x, g))
return x, a, g
# Animation for Newton's method
x0 = np.zeros(2)
true_sol = np.array([2., 1])
fig, ax = plt.subplots(figsize=(8,6))
CS = ax.contourf(XX, YY, ZZ, levels=30)
cb = fig.colorbar(CS)
cb.ax.set_ylabel('f(x,y)')
def animate(i):
ax.cla()
ax.set_xlim(-3, 7)
ax.set_ylim(-4, 6)
ax.contourf(XX, YY, ZZ, levels=30)
x, a, g = steepest_descent_nstep(fgrad, fa, x0, i)
ax.plot(x[0], x[1], 'o', color='r', ms=6, label='Steepest descent method')
ax.quiver([x[0]], [x[1]], [-a*g[0]], [-a*g[1]], angles='xy', scale_units='xy', scale=1,
color='m', label='Negative gradient direction')
ax.plot(true_sol[0], true_sol[1], 's', color='green', ms=6, label='True solution')
ax.set_title('Steepest descent : iteration step '+str(i), size=16)
ax.set_xlabel('$x$', size=16)
ax.set_ylabel('$y$', size=16)
ax.legend(loc='upper right')
plt.close()
anim = FuncAnimation(fig, animate, frames=20, interval=1000)
HTML(anim.to_jshtml())
Exercise 7.2-1
Consider the Rosenbrock function
where \(a=1\) and \(b=100\). Apply Newton’s method, conjugate gradient and steepest descent to the function to find its minimizer.
Exercise 7.2-2
Consider the Beale function
defined on \([-4.5, 4.5]^2\). Apply Newton’s method, conjugate gradient and steepest descent to the function to find its minimizer.
Exercise 7.2-3
Show that Newton’s method applied to a cost function of the following form,
where \(a, b, c, d, e\in\mathbb{R}\), converges in just one step.